
A phase regulator can make AMR management more predictable. Source: VisualNest AI, Adobe Stock
Predictability is not stability. In my previous article, I proposed a priority-based architecture aimed at ensuring the predictability of autonomous mobile robots, or AMRs. Before we discuss phase regulation, let’s see the concepts I introduced:
- Hierarchies of missions
- Clearly defined interaction subjects
- Context-dependent levels of decision-making
- Neutral-autonomous status for legal predictability
The goal was structural clarity: who makes decisions, within which mission, and under which constraints. However, structural predictability alone does not guarantee behavioral stability in real time. AMRs operating in warehouses, hospitals, or shopping centers regularly encounter dynamic environments:
- Sudden appearance of obstacles
- Sharp increase in human flow
- Map inconsistencies
- Sensor noise
- Conflicing recovery scenarios
In such situations, failure is not mechanical. It is computational. Robots freeze. They oscillate between behaviors. They excessively expand the search tree. They exceed acceptable decision latency. This article introduces a control layer designed to regulate such instability.
The real problem: Combinatorial overload
Modern autonomous mobile robots combine:
- SLAM (simultaneous localization and mapping) or localization filters
- Global and local planners (A*, Hybrid A*, RRT*, MPC)
- Behavior trees
- Recovery mechanisms
- Learned policies
Each component individually is stable. Instability emerges at the level of their integration. When environmental complexity increases, planners expand more nodes. When ambiguity grows, the Behavior Tree switches more frequently. When obstacle maps become denser, reactive controllers become more aggressive.
The result is not physical failure. The result is computational divergence. It is not a defect of a specific algorithm. It emerges when external environmental pressure and internal conflict within the control stack increase simultaneously.
This corresponds to accelerated structural dynamics of the system – simultaneous amplification of the external task gradient (Delta N) and internal behavioral divergence (Delta D). In practical terms, this means accelerated growth of computational instability. In real time this manifests predictably: latency increases, the processor becomes overloaded, the decision cycle loses determinism. It is at this stage that meta-level intervention is required – before oscillation or deadlock occurs.
How to limit complexity crowth without losing search capability
In combinatorial experiments with a structural compression mechanism — Combinatorial Compression Engine (CCE) — it was demonstrated that, with proper search organization, it is possible to significantly reduce the explored search space without losing solution validity.
Although those experiments were conducted outside a robotics stack, the principle of structural constraint directly applies to AMR planning: instead of exponential growth of alternatives, the system must dynamically limit search depth and branching.
This is precisely the role of the phase regulator described below. Structural compression principles are implemented in the open repository: https://github.com/Zhenis-ref/Combinatorial-Compression-Engine

Management of AMRs can be complex without phase regulators. Source: ShortFilmStock AI, Adobe Stock
Two-dynamic behavioral phase regulator
A lightweight supervisory layer is proposed, based on two real-time signals.
ΔN is an external task gradient. It reflects deviation of the current state from the target mission equilibrium. For an autonomous mobile robot, Delta N may be associated with:
- Trajectory tracking error
- Gradient of the local planner cost function
- Rate of change in obstacle density
- Growth of localization covariance
- Sensor data novelty
ΔN answers the question: How strongly does the environment push the system out of its stable state?
ΔD is internal behavioral divergence. It reflects conflict within the decision-making stack. For an AMR, Delta D may correspond to:
- Frequency of behavior tree switching
- Frequent activation of recovery branches
- Divergence of alternative trajectories
- High entropy of action selection
- High-frequency oscillations of control signals
ΔD answers the question: How conflicting is the control process itself?
Why two parameters? Most systems monitor either environmental complexity or controller stability. Few monitor both aspects — and almost none regulate their interaction. For aggregation, a simple nonlinear second-order model can be used:
I = wN * ΔN + wD * ΔD + k * ΔN * ΔD
The cross term reflects a critical regime arising from simultaneous growth of external pressure and internal conflict. High ΔN alone is manageable. High ΔD alone is correctable. Their combination forms a phase boundary of instability.
Phase regulation
System state can be mapped into four operational zones:
| Zone | ΔN | ΔD | System response |
|---|---|---|---|
| Nominal | Low | Low | Full planning depth |
| Reactive | High | Low | Reduced horizon, reactive priority |
| Conflict | Low | High | Branching limitation |
| Critical | High | High | Degraded mode |
The above operational zones are visualized on the ΔN – ΔD phase map (Figure 1)
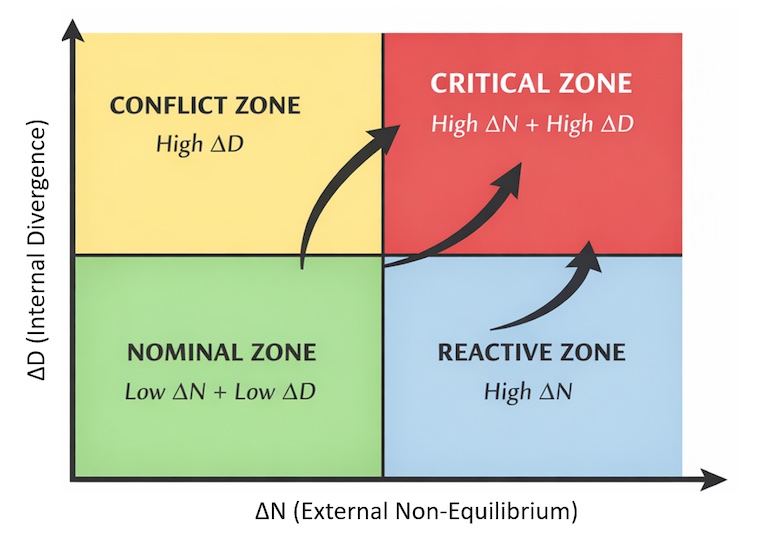
Figure 1. ΔN-ΔD phase map of computational stability in AMR systems.
Figure 1. ΔN-ΔD phase map of computational stability in AMR systems.
ΔN and ΔD can be computed from existing diagnostic data. ΔN is a normalized combination of:
- Trajectory error
- Growth of EKF covariance
- Derivative of cost function
- Density of dynamic obstacles
ΔD — indicators of internal inconsistency include:
- Behavior tree switching frequency
- KL-divergence of alternative trajectories
- Divergence between global and local plans
- Variance of control signals
No new sensors are required. The regulator aggregates existing signals into a stable instability index. This transforms instability detection into active complexity control.
Integration into the AMR stack
Architecture rewriting is not required. The regulator can be implemented as a ROS 2 node:
- Subscription to diagnostic topics
- Computation of ΔN and ΔD (50-100 Hz)
- Publication of instability index
- Dynamic adjustment of planner parameters
Examples of adaptation:
- Reduction of max_planning_time
- Limitation of search depth
- Reduction of branching factor
- Disabling resource-intensive subtrees
- Switching to simplified local planner
This allows latency to remain within computational budget even as environmental complexity grows.
Significance for certification
In the previous architecture, predictability was structural. With the introduction of the phase regulator, predictability becomes dynamic. The system records the instability index, the current operational zone, and the history of transitions.
Reduction of behavioral complexity and, if necessary, transition to protective mode are determined by reaching a computable phase boundary rather than by accumulation of errors. This allows you to limit complexity before exceeding latency budget, form loggable criteria for transition to safe mode, and create a reproducible analysis of transition causes.
A system that transitions to protective mode based on a quantitatively defined criterion is significantly more certifiable than an architecture relying on heuristic timeouts.
From structure to phase-regulated autonomy
The priority-based architecture defined who makes decisions. The phase regulator defines when complexity must be limited. Together they provide structural predictability, real-time stability, and controllable computational complexity.
Open environments create combinatorial pressure. Managing that pressure is the next step toward reliable autonomy.
Practical recommendations for AMR teams
- If your robot freezes in a crowd, measure not only latency but also behavior tree switching frequency — this is an indicator of internal divergence (ΔD).
- If recovery behavior activates above a defined threshold, you are already in the conflict zone. Reduce the planning horizon.
- Growth of obstacle density in costmap should automatically reduce planning horizon – otherwise growth of ΔN will lead to exponential branching.
- Log transitions between operational zones. This significantly simplifies safety audit.
- Degraded mode must be formally defined, not triggered by timeout.

A phase regulator can prevent robot failure
AMR systems do not fail due to actuator breakdown. They fail when the decision stack becomes overloaded. The phase regulator based on ΔN and ΔD allows you to:
- Maintain deterministic latency
- Prevent oscillations
- Ensur predictable degraded modes
- Improve robustness in real environments It does not replace planners. It regulates their complexity.
In dynamic environments, stability is defined by the system’s ability to manage its own computational load.
About the author
Zhengis Tileubay is an independent researcher from the Republic of Kazakhstan working on issues related to the interaction between humans, autonomous systems, and artificial intelligence. His work is focused on developing safe architectures for robot behavior control and proposing new legal approaches to the status of autonomous technologies.
In the course of his research, Tileubay developed a behavior control architecture based on a hierarchy of missions and interacting subjects. He has also proposed the concept of the “neutral-autonomous status.”
Tileubay has filed a patent application for this architecture entitled “Autonomous Robot Behavior Control System Based on Hierarchies of Missions and Interaction Subjects, with Context Awareness” with the Patent Office of the Republic of Kazakhstan. He can be reached at zhenis.tleubay@gmail.com.
The post Phase stability regulator based on two dynamic parameters for autonomous mobile robots appeared first on The Robot Report.