Sponsored by GAM.
GAM offers gearboxes in a wide variety of configurations, precisions and capacities to cover a broad range of applications. (Image: GAM.)
When sizing a servo gearbox, it’s tempting to focus on a single number. In many cases, engineers make their selection based primarily on torque, speed, or inertia matching. But considering only one specification instead of how multiple parameters interact can lead to a variety of issues—such as a gearbox and servo motor that are either oversized or undersized for the application.
Oversizing means paying for more gearbox than the application needs, while undersizing can result in downtime and unexpected costs when the gearbox fails. Even without outright failure, an undersized gearbox is likely to overheat or cause poor machine performance.
“Our joke within the office is that the gearbox acts as the fuse in the system,” says Matt Ruggles, senior design engineer at GAM, a U.S.-based manufacturer of servo gear reducers and other motion control components. “If something goes wrong, the gearbox is the thing that breaks.”
Several specifications come into play when selecting a servo gearbox. Torque demand is one of the first factors to consider, encompassing nominal torque, acceleration torque, and emergency torque.
Nominal torque refers to the continuous output torque a gearbox can transmit during normal operation without overheating or excessive wear. In cyclical applications, RMS output torque accounts for variations in the duty cycle. Acceleration torque reflects the short bursts of torque required to speed up or slow down the load. Emergency torque defines the maximum level the gearbox can withstand briefly during abnormal events such as emergency stops or crashes, and is usually limited to a fixed number of events.
Radial and axial load capacity must also be evaluated. These ratings are based on the capacity of the gearbox bearings and indicate how much load the output shaft can carry.
And then there’s inertia, which describes how resistant a load is to changes in motion. Gearboxes are typically used to help match the inertia of the servo motor to that of the driven load.
The environment where the system operates can introduce additional requirements, such as temperature limits, IP ratings, or corrosion resistance. In food-processing environments, for example, gearboxes may need to use food-safe materials.

Stainless steel inline planetary gearbox for washdown or clean environments. (Image: GAM.)
According to Ruggles, gearbox selection should start by identifying what the application is actually demanding from the system; that might be radial load capacity, torque transmission, or another constraint. The remaining specifications can then be addressed in sequence.
“I haven’t seen a gearbox that can do everything, as much as I would like there to be,” says Ruggles. “There’s always going to be compromises, and it’s just a question of what is really the thing you were trying to achieve at the end of the day.”
Focusing too heavily on one specification can create unintended consequences elsewhere in the system. Ruggles points to bearing capacity as an example. If radial load is the only factor considered, the result is often a gearbox that’s too large, with an undersized motor in comparison. When that imbalance occurs, the motor can struggle to perform and end up stalling.
“You have this tiny little motor trying to turn this big gearbox,” says Ruggles. “It’s the little engine that couldn’t. Something that we can do at GAM is if you have a very high radial load, we can provide additional support at the output without having to enlarge the main size of the gearbox. We can custom tailor it to match the application instead of just going into the catalog and saying, ‘Here’s the biggest gearbox we have—good luck.’”
Another situation can arise when applications rely on extremely high gearbox ratios to achieve fine positioning or inertia matching. “With motors, they’re never perfectly smooth in their torque,” says Ruggles. “There’s some torque ripple. Those small ripples can result in large torque variations at the output. If you’re not careful, it can be very easy to over-torque the gearbox or overpower what’s happening at the output.”
High ratios can also make it harder to understand what is happening within the system during tuning or troubleshooting, since variations occurring at the load may be dampened before they reach the motor.
“Having a good, broad understanding of what’s happening in the application can impact other aspects of the gearbox that you weren’t anticipating,” adds Ruggles. “Sometimes it’s the environment, sometimes it’s an unexpected shock load, sometimes it’s as simple as the person assembling the machine having trouble reaching a bolt.”
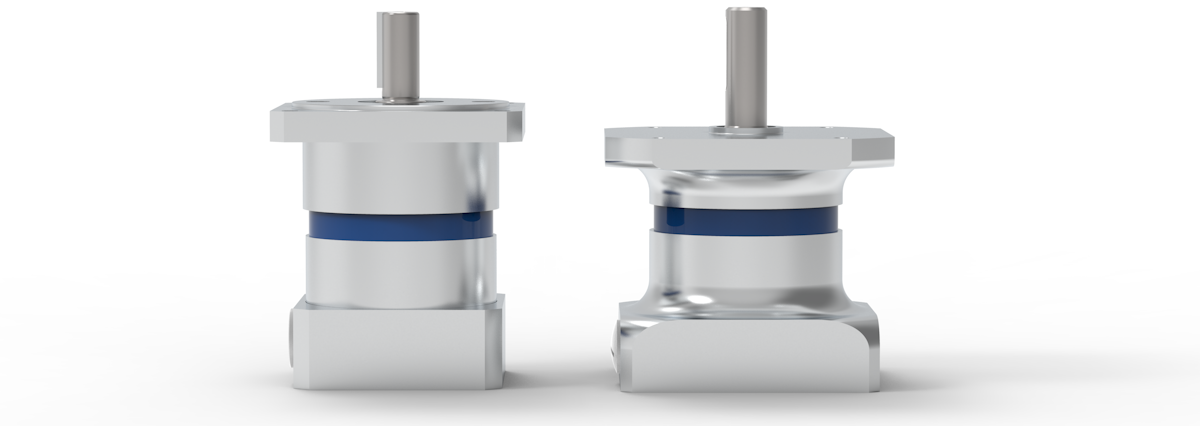
A customized inline gearbox (right) has a shorter length compared to the standard (left). This small change helped simplify a machine design, for a large savings to the builder. (Image: GAM.)
In practice, the application does not always behave the way the original calculations suggest. Systems may be sized based on the expected torque required to move a load, only for the actual load to be larger or have a different inertia than anticipated. Those differences can tip the balance of what the motor and gearbox are capable of handling, especially in designs that operate close to their limits.
“Application sizing can be really tricky,” says Ruggles. “Being proud and thinking you’ve got it all sometimes can bring down a whole project. We’ve got a lot of experience at GAM, and we’re happy to help people with their application sizing.”
To learn more, visit GAM.
The post How to avoid over- or under-sizing a servo gearbox appeared first on The Robot Report.